

실시간 시계 배터리를 교체합니다
 변경 제안
변경 제안
정확한 시간 동기화에 의존하는 시스템 서비스 및 응용 프로그램이 계속 작동할 수 있도록 컨트롤러 모듈의 실시간 클럭(RTC) 배터리를 교체합니다.
-
이 절차는 시스템에서 지원하는 모든 버전의 ONTAP에서 사용할 수 있습니다
-
시스템의 다른 모든 구성 요소가 올바르게 작동해야 합니다. 그렇지 않은 경우 기술 지원 부서에 문의해야 합니다.
1단계: 손상된 컨트롤러를 종료합니다
손상된 컨트롤러의 기능을 인계받아 중지시키면 정상적인 컨트롤러가 손상된 컨트롤러의 스토리지에서 데이터를 계속 제공할 수 있습니다. 이를 위해 AutoSupport에서 자동 케이스 생성을 억제하고 자동 반환 기능을 비활성화한 다음 손상된 컨트롤러를 LOADER 프롬프트로 전환합니다. LOADER 프롬프트는 FRU를 교체할 수 있는 안전한 중지 상태입니다.
노드가 2개 이상인 클러스터가 있는 경우 쿼럼에 있어야 합니다. 클러스터가 쿼럼에 없거나 정상 컨트롤러에 자격 및 상태에 대해 FALSE가 표시되는 경우 손상된 컨트롤러를 종료하기 전에 문제를 해결해야 합니다(참조) "노드를 클러스터와 동기화합니다".
-
AutoSupport가 활성화된 경우 AutoSupport 메시지를 호출하여 자동 케이스 생성을 억제합니다.
system node autosupport invoke -node * -type all -message MAINT=<number of hours down>h이렇게 하면 예정된 유지보수 윈도우 동안 자동 지원 케이스가 열리지 않습니다. 최대 차단 기간은 72시간입니다. 유지 관리가 조기에 완료된 경우 `MAINT=END`와 함께 AutoSupport 메시지를 호출하여 케이스 생성을 다시 활성화할 수 있습니다. 자세한 내용은 "예정된 유지보수 윈도우 동안 자동 케이스 생성을 억제하는 방법"을 참조하십시오.
다음 AutoSupport 메시지는 2시간 동안 자동 케이스 생성을 억제합니다.
cluster1:*> system node autosupport invoke -node * -type all -message MAINT=2h -
손상된 컨트롤러가 HA 쌍의 일부인 경우 정상 컨트롤러의 콘솔에서 '스토리지 페일오버 수정-노드 로컬-자동 반환 거짓'을 자동 반환하도록 해제합니다
-
손상된 컨트롤러를 로더 프롬프트로 가져가십시오.
손상된 컨트롤러가 표시되는 경우… 그러면… LOADER 메시지가 표시됩니다
컨트롤러 모듈 제거 로 이동합니다.
반환 대기 중…
Ctrl+C를 누른 다음 y를 누릅니다.
시스템 프롬프트 또는 암호 프롬프트(시스템 암호 입력)
정상적인 컨트롤러 'storage failover takeover -ofnode_impaired_node_name_'에서 손상된 컨트롤러를 인수하거나 중단합니다
손상된 컨트롤러에 기브백을 기다리는 중… 이 표시되면 Ctrl-C를 누른 다음 y를 응답합니다.
-
시스템에 섀시에 하나의 컨트롤러 모듈만 있는 경우 전원 공급 장치를 끈 다음 손상된 컨트롤러의 전원 코드를 전원에서 분리합니다.
2단계: 컨트롤러 모듈을 분리합니다
컨트롤러 내의 구성 요소에 액세스하려면 먼저 시스템에서 컨트롤러 모듈을 분리한 다음 컨트롤러 모듈의 덮개를 분리해야 합니다.
-
아직 접지되지 않은 경우 올바르게 접지하십시오.
-
케이블을 케이블 관리 장치에 연결하는 후크 및 루프 스트랩을 푼 다음, 케이블이 연결된 위치를 추적하면서 컨트롤러 모듈에서 시스템 케이블과 SFP(필요한 경우)를 분리합니다.
케이블 관리 장치에 케이블을 남겨 두면 케이블 관리 장치를 다시 설치할 때 케이블이 정리됩니다.
-
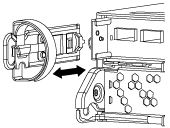
컨트롤러 모듈의 왼쪽과 오른쪽에서 케이블 관리 장치를 분리하여 한쪽에 둡니다.
-
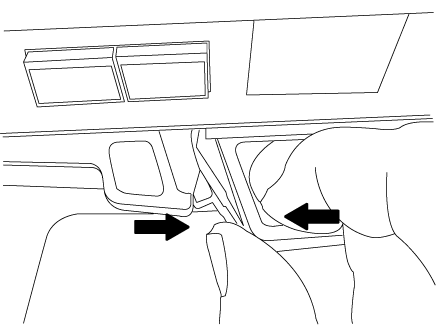
캠 손잡이의 래치를 꽉 잡고 캠 핸들을 완전히 열어 미드플레인에서 컨트롤러 모듈을 분리한 다음 두 손으로 컨트롤러 모듈을 섀시에서 꺼냅니다.
-
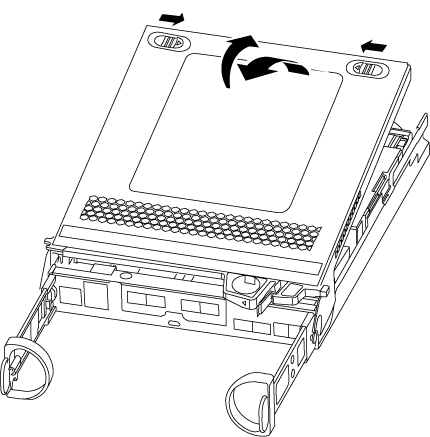
컨트롤러 모듈을 뒤집어 평평하고 안정적인 곳에 놓습니다.
-
파란색 탭을 밀어 덮개를 연 다음 덮개를 위로 돌려 엽니다.
3단계: RTC 배터리를 교체합니다
RTC 배터리를 교체하려면 컨트롤러 내부에 있는 배터리를 찾아 특정 단계를 따르십시오.
-
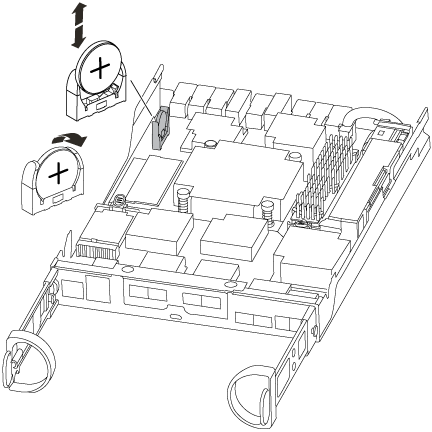
RTC 배터리를 찾습니다.
-
배터리를 홀더에서 조심스럽게 밀어내고 홀더에서 돌린 다음 홀더에서 들어 꺼냅니다.

배터리함을 홀더에서 분리할 때 배터리의 극성에 유의하십시오. 배터리에는 플러스 기호가 표시되어 있으며 홀더에 올바르게 위치해야 합니다. 홀더 근처에 있는 더하기 기호는 배터리를 어떻게 배치해야 하는지 알려줍니다. -
정전기 방지 운송용 백에서 교체용 배터리를 제거합니다.
-
컨트롤러 모듈에서 빈 배터리 홀더를 찾습니다.
-
RTC 배터리의 극성을 확인한 다음 배터리를 비스듬히 기울이고 아래로 눌러 홀더에 삽입합니다.
-
배터리를 육안으로 검사하여 홀더가 완전히 장착되어 있고 극성이 올바른지 확인하십시오.
4단계: 컨트롤러 모듈을 다시 설치하고 RTC 배터리 교체 후 시간/날짜를 설정합니다
컨트롤러 모듈 내에서 구성 요소를 교체한 후에는 시스템 섀시에 컨트롤러 모듈을 재설치하고, 컨트롤러의 시간 및 날짜를 재설정한 다음 부팅해야 합니다.
-
에어 덕트 또는 컨트롤러 모듈 커버를 아직 닫지 않은 경우 닫으십시오.
-
컨트롤러 모듈의 끝을 섀시의 입구에 맞춘 다음 컨트롤러 모듈을 반쯤 조심스럽게 시스템에 밀어 넣습니다.
지시가 있을 때까지 컨트롤러 모듈을 섀시에 완전히 삽입하지 마십시오.
-
필요에 따라 시스템을 다시 연결합니다.
미디어 컨버터(QSFP 또는 SFP)를 분리한 경우 광섬유 케이블을 사용하는 경우 다시 설치해야 합니다.
-
전원 공급 장치가 연결되어 있지 않은 경우 전원 공급 장치를 다시 연결하고 전원 케이블 고정 장치를 다시 설치합니다.
-
컨트롤러 모듈 재설치를 완료합니다.
-
캠 핸들을 열린 위치에 둔 상태에서 컨트롤러 모듈이 중앙판과 완전히 맞닿고 완전히 장착될 때까지 단단히 누른 다음 캠 핸들을 잠금 위치로 닫습니다.
커넥터가 손상되지 않도록 컨트롤러 모듈을 섀시에 밀어 넣을 때 과도한 힘을 가하지 마십시오. -
아직 설치하지 않은 경우 케이블 관리 장치를 다시 설치하십시오.
-
케이블을 후크와 루프 스트랩으로 케이블 관리 장치에 연결합니다.
-
전원 케이블을 전원 공급 장치와 전원에 다시 연결한 다음 전원을 켜서 부팅 프로세스를 시작합니다.
-
LOADER 프롬프트에서 컨트롤러를 중단합니다.
-
-
컨트롤러의 시간 및 날짜를 재설정합니다.
-
'show date' 명령으로 정상적인 컨트롤러의 날짜 및 시간을 확인한다.
-
대상 컨트롤러의 LOADER 프롬프트에서 시간 및 날짜를 확인합니다.
-
필요한 경우 'mm/dd/yyyy' 명령으로 날짜를 수정합니다.
-
필요한 경우 '시간 설정 hh:mm:ss' 명령을 사용하여 GMT로 시간을 설정합니다.
-
대상 컨트롤러의 날짜 및 시간을 확인합니다.
-
-
LOADER 프롬프트에서 BYE를 입력하여 PCIe 카드 및 기타 구성 요소를 재초기화하고 컨트롤러를 재부팅합니다.
-
스토리지 'storage failover back-ofnode_impaired_node_name_'을 제공하여 컨트롤러를 정상 작동 상태로 되돌립니다
-
자동 반환이 비활성화된 경우 'Storage failover modify -node local -auto-반환 true'를 다시 설정합니다
5단계: 교체 프로세스를 완료합니다
키트와 함께 제공된 RMA 지침에 설명된 대로 오류가 발생한 부품을 NetApp에 반환합니다. "부품 반환 및 교체"자세한 내용은 페이지를 참조하십시오.