

USB フラッシュドライブ AFF A320 を使用してブートメディアにブートイメージを転送します
 変更を提案
変更を提案
インストールした交換用ブート メディアにはブート イメージが含まれていないため、USB フラッシュ ドライブを使用してブート イメージを転送する必要があります。AFF A320システムは、手動のブート メディア リカバリ手順のみをサポートします。自動ブート メディア リカバリはサポートされていません。
-
4GB 以上の容量の MBR / FAT32 にフォーマットされた USB フラッシュドライブが必要です
-
障害のあるコントローラが実行していたバージョンの ONTAP イメージのコピー。該当するイメージは、ネットアップサポートサイトのダウンロードセクションからダウンロードできます
-
NVE が有効な場合は、ダウンロードボタンの指示に従って、 NetApp Volume Encryption を使用してイメージをダウンロードします。
-
NVE が有効になっていない場合は、ダウンロードボタンの指示に従って、 NetApp Volume Encryption なしでイメージをダウンロードします。
-
-
HA ペアのシステムの場合は、ネットワーク接続が必要です。
-
スタンドアロンシステムの場合はネットワーク接続は必要ありませんが、 var ファイルシステムをリストアしたときに追加のリブートを実行する必要があります。
-
ネットアップサポートサイトから USB フラッシュドライブに適切なサービスイメージをダウンロードしてコピーします。
-
ラップトップの作業スペースにサービスイメージをダウンロードします。
-
サービスイメージを解凍します。

Windows を使用して内容を展開する場合は、 winzip を使用してネットブートイメージを展開しないでください。7-Zip や WinRAR など、別の抽出ツールを使用します。 解凍されたサービスイメージファイルには、次の 2 つのフォルダがあります。
-
/boot
-
EFI
-
-
EFI フォルダを USB フラッシュドライブの最上位ディレクトリにコピーします。
USB フラッシュドライブには、 EFI フォルダと、障害のあるコントローラが実行しているものと同じバージョンの Service Image ( BIOS )が必要です。
-
USB フラッシュドライブをラップトップから取り外します。
-
-
まだ行っていない場合は、エアダクトを閉じます。
-
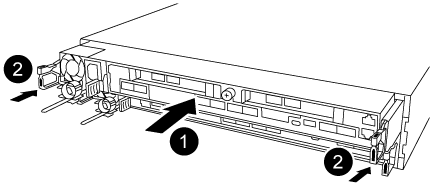
コントローラモジュールの端をシャーシの開口部に合わせ、コントローラモジュールをシステムに半分までそっと押し込みます。
-
ケーブルマネジメントデバイスを再び取り付け、必要に応じてシステムにケーブルを再接続します。
ケーブルを再接続する際は、メディアコンバータ( SFP または QSFP )も取り付け直してください(メディアコンバータを取り外した場合)。
-
電源装置に電源ケーブルを接続し、電源ケーブルの固定クリップを再度取り付けます。
-
USB フラッシュドライブをコントローラモジュールの USB スロットに挿入します。
USB フラッシュドライブは、 USB コンソールポートではなく、 USB デバイス用のラベルが付いたスロットに取り付けてください。
-
コントローラモジュールの再取り付けを完了します。
-
ラッチアームが引き出された位置で固定されていることを確認します。
-
ラッチアームを使用して、コントローラモジュールをシャーシベイの奥まで押し込みます。
ラッチアームの上部にあるラッチを押し下げないでください。そのためには、ロックを上げて、コントローラモジュールがシャーシにスライドしないようにします。 -
ラッチ上部にあるオレンジ色のタブを押し下げます。
-
コントローラモジュールをシャーシの端と揃うまで、シャーシベイにそっと押し込みます。
ラッチのアームがシャーシ内にスライドします。
-
コントローラモジュールは、シャーシに完全に装着されるとすぐにブートを開始します。
-
ラッチを外してコントローラモジュールを所定の位置に固定します。
-
ケーブルマネジメントデバイスをまだ取り付けていない場合は、取り付け直します。
-
Ctrl+C キーを押してブートプロセスを中断し、 LOADER プロンプトで停止します。
このメッセージが表示されない場合は、 Ctrl+C キーを押し、メンテナンスモードでブートするオプションを選択してから、コントローラを停止して LOADER プロンプトを表示します。
-
環境変数と bootargs は保持されますが 'printenv bootargname' コマンドを使用して ' 必要なすべてのブート環境変数と bootargs がシステムタイプと構成に適切に設定されていることを確認し 'setenv variable-name <value> コマンドを使用してエラーを修正する必要があります
-
-
ブート環境変数を確認します。
-
bootarg.init.boot_clustered`
-
「 partner-sysid 」
-
AFF C190 / AFF A220 (オールフラッシュ FAS )用 bootarg.init.flash_optimized`
-
bootarg.init.san_optimized(AFF A220およびオールフラッシュSANアレイの場合) -
bootarg.init.switchless_cluster.enable`
-
-
外部キーマネージャが有効になっている場合は、「 kenv 」 ASUP 出力に表示された bootarg 値を確認します。
-
bootarg.storageencryption.support <value>
-
bootarg.keymanager. support <value>
-
「 kmip.init.interface 」 <value> です
-
「 kmip.init.ipaddr 」 <value> です
-
「 kmip.init.netmask 」 <value> です
-
「 kmip.init.gateway 」 <value> です
-
-
オンボードキーマネージャが有効になっている場合は、「 kenv 」 ASUP 出力に表示されている bootarg 値を確認します。
-
bootarg.storageencryption.support <value>
-
bootarg.keymanager. support <value>
-
'bootarg.onboard keymanager <value>
-
-
'avenv' コマンドを使用して変更した環境変数を保存します
-
printenv_variable-name_` コマンドを使用して、変更を確認します。
-
LOADER プロンプトから、 USB フラッシュドライブ「 boot_recovery 」からリカバリ・イメージをブートします
イメージが USB フラッシュドライブからダウンロードされます。
-
プロンプトが表示されたら、イメージの名前を入力するか、画面に表示されたデフォルトのイメージをそのまま使用します。
-
イメージがインストールされたら、リストアプロセスを開始します。
-
-
画面に表示される障害が発生したコントローラの IP アドレスをメモします。
-
バックアップ構成を復元するかどうかを確認するメッセージが表示されたら 'y' を押します
-
/etc/ssh/ssh_host_DSA_KEY を上書きするかどうかを確認するメッセージが表示されたら 'y' を押します
-
advanced 権限レベルのパートナーコントローラから、前の手順で記録した IP アドレスを使用して設定の同期を開始します。「 system node restore-backup -node local-target-impaired_node_name _ip_address _`
-
復元に成功した場合は、復元されたコピーを使用するかどうかを確認するメッセージが表示されたら、障害のあるコントローラの「 y 」を押します。
-
バックアップ手順 が正常に完了したことを確認したら 'y' を押し ' プロンプトが表示されたら 'y' を押してコントローラを再起動します
-
環境変数が正しく設定されていることを確認します。
-
-
コントローラに LOADER プロンプトを表示します。
ONTAP プロンプトから問題、 system node halt -skip-lif-migration-before-shutdown true -ignore-quorum -warnings true -inhibit-takeover true コマンドを実行できます。
-
printenv コマンドを使用して ' 環境変数の設定を確認します
-
環境変数が正しく設定されていない場合は 'setenv_environment-variable-name___ changed-value_` コマンドで変更します
-
「 savenv 」コマンドを使用して、変更内容を保存します。
-
コントローラをリブートします。
-
リブートされた障害のあるコントローラに「 Waiting for giveback… 」というメッセージが表示されたら、正常なコントローラからギブバックを実行します。
システムの構成 作業 HA ペア
障害のあるコントローラに「 Waiting for giveback… 」というメッセージが表示されたら、正常なコントローラからギブバックを実行します。
-
正常なコントローラから: storage failover giveback -ofnode partner_node_name
障害のあるコントローラはストレージをテイクバックしてブートを完了し、その後リブートして再び正常なコントローラによってテイクオーバーされます。
ギブバックが拒否されている場合は、拒否を無効にすることを検討してください。 -
「 storage failover show-giveback 」コマンドを使用して、ギブバック処理の進捗を監視します。
-
ギブバック処理が完了したら、「 storage failover show 」コマンドを使用して、 HA ペアが正常でテイクオーバーが可能であることを確認します。
-
storage failover modify コマンドを使用して自動ギブバックを無効にした場合は、自動ギブバックをリストアします。
-
-
正常なコントローラで advanced 権限レベルを終了します。
-
-