

AFF C800システムのリアルタイムクロックバッテリーを交換する
 変更を提案
変更を提案
正確な時間同期に依存するサービスとアプリケーションが引き続き動作できるように、 AFF C800システムのリアルタイム クロック (RTC) バッテリ (一般にコイン型電池と呼ばれる) を交換します。
-
この手順は、システムでサポートされるすべてのバージョンのONTAPで使用できることを理解しておいてください。
-
システムのその他のコンポーネントがすべて正常に動作していることを確認します。問題がある場合は、必ずテクニカルサポートにお問い合わせください。
手順 1 :障害のあるコントローラをシャットダウンします
障害のあるコントローラをシャットダウンするかテイクオーバーします。
障害のあるコントローラーを引き継いで停止し、正常なコントローラーが障害のあるコントローラーのストレージからデータを引き続き提供できるようにします。これを行うには、AutoSupportで自動ケース作成を抑制し、自動ギブバックを無効にして、障害のあるコントローラをLOADERプロンプトに切り替えます。LOADERプロンプトは、FRUを交換できる安全な停止状態です。
-
SANシステムを使用している場合は、障害コントローラのSCSIブレードのイベントメッセージを確認しておく必要があり `cluster kernel-service show`ます)。コマンド(priv advancedモードから)を実行すると、 `cluster kernel-service show`そのノードのノード名、そのノードの可用性ステータス、およびそのノードの動作ステータスが表示され"クォーラムステータス"ます。
各 SCSI ブレードプロセスは、クラスタ内の他のノードとクォーラムを構成している必要があります。交換を進める前に、すべての問題を解決しておく必要があります。
-
ノードが 3 つ以上あるクラスタは、クォーラムを構成している必要があります。クラスタがクォーラムを構成していない場合、または正常なコントローラで適格性と正常性についてfalseと表示される場合は、障害のあるコントローラをシャットダウンする前に問題 を修正する必要があります。を参照してください "ノードをクラスタと同期します"。
-
AutoSupportが有効になっている場合は、AutoSupportメッセージを呼び出してケースの自動作成を停止します。
system node autosupport invoke -node * -type all -message MAINT=<number of hours down>hこれにより、計画メンテナンス期間中に自動的にサポートケースが開かれるのを防ぎます。最大抑制時間は72時間です。メンテナンスが予定より早く完了した場合は、AutoSupportメッセージを `MAINT=END`で呼び出すことでケース作成を再度有効にできます。詳細については、 "How to suppress automatic case creation during scheduled maintenance windows"を参照してください。
次のAutoSupport メッセージは、ケースの自動作成を2時間停止します。
cluster1:> system node autosupport invoke -node * -type all -message MAINT=2h -
自動ギブバックを無効にする:
-
正常なコントローラのコンソールから次のコマンドを入力します。
storage failover modify -node impaired_node_name -auto-giveback false -
入力
y「自動ギブバックを無効にしますか?」というプロンプトが表示されたら、
-
-
障害のあるコントローラに LOADER プロンプトを表示します。
障害のあるコントローラの表示 作業 LOADER プロンプト
次の手順に進みます。
ギブバックを待っています
Ctrl キーを押しながら C キーを押し ' プロンプトが表示されたら y と入力します
システムプロンプトまたはパスワードプロンプト
正常なコントローラから障害コントローラをテイクオーバーまたは停止します。
storage failover takeover -ofnode impaired_node_name -halt true_-halt true _パラメータを指定すると、Loaderプロンプトが表示されます。
手順 2 :コントローラモジュールを取り外す
コントローラモジュールを交換する場合やコントローラモジュール内部のコンポーネントを交換する場合は、コントローラモジュールをシャーシから取り外す必要があります。
-
接地対策がまだの場合は、自身で適切に実施します。
-
シャーシ内のすべてのドライブがミッドプレーンにしっかりと装着されていることを確認します。そのためには、両手の親指を使って、プラスの停止を感じるまで各ドライブを押します。
ビデオ - ドライブの座席の確認
-
システム ステータスに基づいてコントローラー ドライブを確認します。
-
正常なコントローラで、アクティブな RAID グループが劣化状態、障害状態、またはその両方にあるかどうかを確認します。
storage aggregate show -raidstatus !*normal*-
コマンドが返された場合 `There are no entries matching your query.`続ける次のサブステップに進み、不足しているドライブを確認します。。
-
コマンドが他の結果を返す場合は、両方のコントローラからAutoSupportデータを収集し、 NetAppサポートに連絡してさらにサポートを受けてください。
system node autosupport invoke -node * -type all -message '<message_name>'
-
-
ファイルシステムまたはスペアドライブの両方で、不足しているドライブの問題がないか確認します。
event log show -severity * -node * -message-name *disk.missing*-
コマンドが返された場合 `There are no entries matching your query.`続ける次のステップに進む。
-
コマンドが他の結果を返す場合は、両方のコントローラからAutoSupportデータを収集し、 NetAppサポートに連絡してさらにサポートを受けてください。
system node autosupport invoke -node * -type all -message '<message_name>'
-
-
-
ケーブル管理デバイスのフックとループのストラップを緩めます。システム ケーブルと SFP/QSFP モジュール (必要な場合) をコントローラー モジュールから取り外します。各ケーブルの位置をメモします。
ケーブルはケーブルマネジメントデバイスに収めたままにします。これにより、ケーブルマネジメントデバイスを取り付け直すときに、ケーブルを整理する必要がありません。
-
ケーブルマネジメントデバイスをコントローラモジュールから取り外し、脇に置きます。
-
両方のロックラッチを押し下げ、両方のラッチを同時に下方向に回転させます。
コントローラモジュールがシャーシから少し引き出されます。
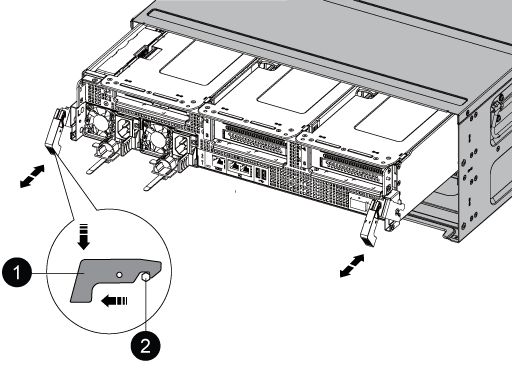

固定ラッチ

ロッキングピン
-
コントローラモジュールをシャーシから引き出し、安定した平らな場所に置きます。
コントローラ モジュールの下部を支えながら、シャーシからスライドさせて取り出します。
手順 3 : RTC バッテリを交換します
RTC バッテリーを交換してください。
RTC バッテリーの交換手順は、コントローラーがオリジナル モデルか VER2 モデルかによって異なります。以下のタブを使用して、コントローラー モデルに適した手順を選択してください。
バッテリーは、オリジナル コントローラーの場合はライザー 2 (中央のライザー) の下、VER2 コントローラーの場合は DIMM の近くにあります。
-
PCIeライザー2(中央のライザー)をコントローラモジュールから取り外します。
-
PCIe カード内の SFP モジュールまたは QSFP モジュールを取り外します。
-
ライザーの左側にあるライザーロックラッチをファンモジュールの方に引き上げます。
ライザーがコントローラモジュールからわずかに持ち上がります。
-
ライザーを持ち上げ、ファンの方に動かしてライザーの金属板の縁がコントローラモジュールの端に接触しないようにします。次に、ライザーを持ち上げてコントローラモジュールから取り外し、安定した平らな場所に置きます。
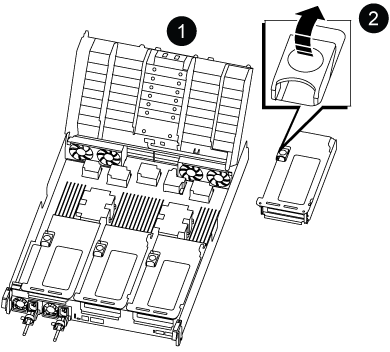
エアダクト
ライザー 2 (中央)のロックラッチ
-
-
ライザー 2 の下で RTC バッテリの場所を確認します。
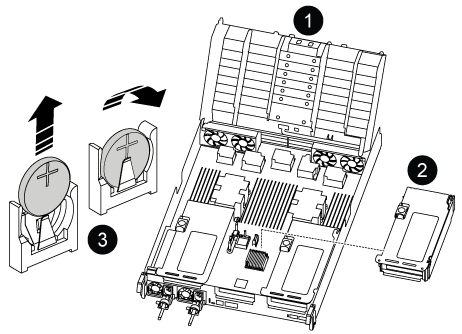
エアダクト
ライザー 2

RTC バッテリとホルダー
-
バッテリをそっと押してホルダーから離し、持ち上げてホルダーから取り出します。

ホルダーから取り外す際に、バッテリの極の向きを確認しておいてください。バッテリに記載されているプラス記号に従って、バッテリをホルダーに正しく配置する必要があります。ホルダーの近くにプラス記号が表示されているので、バッテリーの位置を確認できます。 -
交換用バッテリを静電気防止用の梱包バッグから取り出します。
-
RTC バッテリの極の向きを確認し、バッテリを斜めに傾けた状態で押し下げてホルダーに挿入します。
-
バッテリがホルダーに完全に取り付けられ、かつ極の向きが正しいことを目で見て確認します。
-
コントローラモジュールにライザーを取り付けます。
-
ライザーの縁をコントローラモジュールの金属板の下側に合わせます。
-
コントローラモジュールのピンにライザーを合わせ、コントローラモジュールに差し込みます。
-
ロックラッチを下に動かして、ロックされるまでクリックします。
ロックされたロックラッチはライザー上部と水平になり、ライザーがコントローラモジュールに垂直に装着されます。
-
PCIe カードから取り外したすべての SFP モジュールを再度取り付けます。
-
-
DIMMの近くでRTCバッテリの場所を確認します。
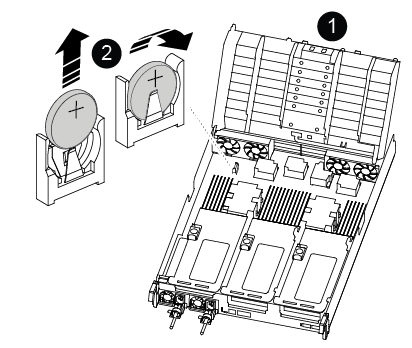
エアダクト
RTC バッテリとホルダー
-
バッテリをそっと押してホルダーから離し、持ち上げてホルダーから取り出します。
ホルダーから取り外す際に、バッテリの極の向きを確認しておいてください。バッテリに記載されているプラス記号に従って、バッテリをホルダーに正しく配置する必要があります。ホルダーの近くにプラス記号が表示されているので、バッテリーの位置を確認できます。 -
交換用バッテリを静電気防止用の梱包バッグから取り出します。
-
RTC バッテリの極の向きを確認し、バッテリを斜めに傾けた状態で押し下げてホルダーに挿入します。
-
バッテリがホルダーに完全に取り付けられ、かつ極の向きが正しいことを目で見て確認します。
手順 4 :コントローラモジュールを再度取り付けます
コントローラモジュールを再度取り付けてリブートします。
-
コントローラモジュールの端をシャーシの開口部に合わせ、コントローラモジュールをシステムに半分までそっと押し込みます。
指示があるまでコントローラモジュールをシャーシに完全に挿入しないでください。 -
必要に応じてシステムにケーブルを再接続します。
光ファイバケーブルを使用する場合は、メディアコンバータ( QSFP または SFP )を取り付け直してください(取り外した場合)。
-
コントローラモジュールの再取り付けを完了します。
-
コントローラモジュールをシャーシに挿入し、ミッドプレーンまでしっかりと押し込んで完全に装着します。
コントローラモジュールが完全に装着されると、ロックラッチが上がります。
コネクタの破損を防ぐため、コントローラモジュールをスライドしてシャーシに挿入する際に力を入れすぎないでください。 -
ロックラッチを上に回転させてロックピンが外れるように傾け、ロックされるまで下げます。
-
電源装置に電源コードを接続し、電源ケーブルロックカラーを再度取り付けてから、電源装置を電源に接続します。
電源が復旧するとすぐにコントローラモジュールがブートを開始します。ブートプロセスを中断する準備をします。
-
ケーブルマネジメントデバイスをまだ取り付けていない場合は、取り付け直します。
-
-
障害コントローラのストレージをギブバックして、障害コントローラを通常動作に戻します。
`storage failover giveback -ofnode impaired_node_name`です。
-
自動ギブバックを無効にした場合は、再度有効にします。
`storage failover modify -node local -auto-giveback true`です。
-
AutoSupportが有効になっている場合は、ケースの自動作成をリストアまたは抑制解除します。
`system node autosupport invoke -node * -type all -message MAINT=END`です。
手順 5 :障害が発生したパーツをネットアップに返却する
障害が発生したパーツは、キットに付属のRMA指示書に従ってNetAppに返却してください。 "パーツの返品と交換"詳細については、ページを参照してください。