

論理アーキテクチャ
 変更を提案
変更を提案
MetroCluster環境でOracleデータベースがどのように動作するかを理解するAlsopでは、MetroClusterシステムの論理機能について説明する必要があります。
サイト障害からの保護:NVRAMとMetroCluster
MetroClusterは、次の方法でNVRAMデータ保護を拡張します。
-
2ノード構成では、NVRAMデータがスイッチ間リンク(ISL)を使用してリモートパートナーにレプリケートされます。
-
HAペア構成では、NVRAMデータがローカルパートナーとリモートパートナーの両方にレプリケートされます。
-
書き込みは、すべてのパートナーにレプリケートされるまで確認応答されません。このアーキテクチャは、NVRAMデータをリモートパートナーにレプリケートすることで、転送中のI/Oをサイト障害から保護します。このプロセスは、ドライブレベルのデータレプリケーションには関係ありません。アグリゲートを所有するコントローラは、アグリゲート内の両方のプレックスに書き込むことでデータレプリケーションを実行しますが、サイトが失われた場合でも転送中のI/Oの損失からデータを保護する必要があります。レプリケートされたNVRAMデータは、障害が発生したコントローラをパートナーコントローラがテイクオーバーする必要がある場合にのみ使用されます。
サイトおよびシェルフ障害からの保護:SyncMirrorとプレックス
SyncMirrorは、RAID DPやRAID-TECを強化するミラーリングテクノロジですが、これに代わるものではありません。2つの独立したRAIDグループの内容をミラーリングします。論理構成は次のとおりです。
-
ドライブは、場所に基づいて2つのプールに構成されます。1つのプールはサイトAのすべてのドライブで構成され、2つ目のプールはサイトBのすべてのドライブで構成されます。
-
次に、アグリゲートと呼ばれる共通のストレージプールが、RAIDグループのミラーセットに基づいて作成されます。各サイトから同じ数のドライブが引き出されます。たとえば、20ドライブのSyncMirrorアグリゲートは、サイトAの10本のドライブとサイトBの10本のドライブで構成されます。
-
サイト上の各ドライブセットは、ミラーリングを使用せずに、完全に冗長化された1つ以上のRAID DPグループまたはRAID-TECグループとして自動的に構成されます。ミラーリングの下でRAIDを使用することで、サイトが失われた場合でもデータを保護できます。
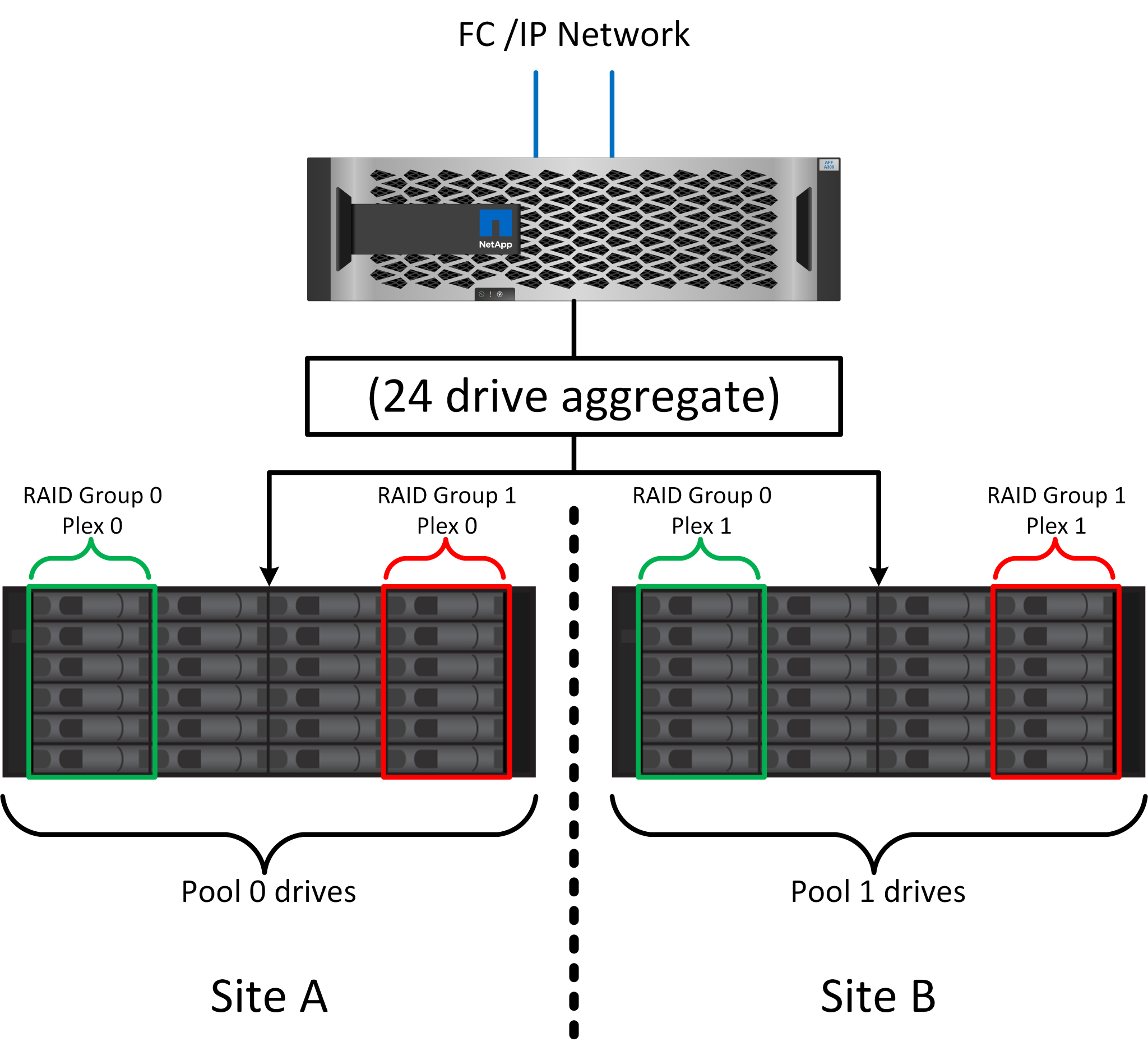
上の図は、SyncMirror構成の例を示しています。24ドライブのアグリゲートをコントローラに作成しました。このアグリゲートは、サイトAで割り当てられたシェルフの12本のドライブと、サイトBで割り当てられたシェルフの12本のドライブで構成されています。ドライブは2つのミラーRAIDグループにグループ化されました。RAIDグループ0には、サイトAの6ドライブのプレックスが含まれており、サイトBの6ドライブのプレックスにミラーリングされています。同様に、RAIDグループ1にはサイトAの6ドライブのプレックスが含まれており、サイトBの6ドライブのプレックスにミラーリングされています。
SyncMirrorは通常、MetroClusterシステムにリモートミラーリングを提供するために使用され、各サイトにデータのコピーが1つずつ配置されます。場合によっては、1つのシステムで追加レベルの冗長性を提供するために使用されます。特に、シェルフレベルの冗長性を提供します。ドライブシェルフにはすでにデュアル電源装置とコントローラが搭載されており、全体的には板金をほとんど使用していませんが、場合によっては追加の保護が保証されることがあります。たとえば、あるNetAppのお客様は、自動車テストで使用するモバイルリアルタイム分析プラットフォームにSyncMirrorを導入しています。システムは、独立した電源供給と独立したUPSシステムを備えた2つの物理ラックに分かれていました。
冗長性エラー:NVFAIL
前述したように、書き込みの確認応答は、少なくとも1台の他のコントローラでローカルのNVRAMとNVRAMに記録されるまで返されません。このアプローチにより、ハードウェア障害や停電が発生しても、転送中のI/Oが失われることはありません。ローカルのNVRAMに障害が発生したり、他のノードへの接続に障害が発生したりすると、データはミラーリングされなくなります。
ローカルNVRAMからエラーが報告されると、ノードはシャットダウンします。このシャットダウンにより、HAペアが使用されている場合はパートナーコントローラにフェイルオーバーされます。MetroClusterでは、動作は選択した全体的な設定によって異なりますが、リモートノートに自動的にフェイルオーバーされる場合があります。いずれの場合も、障害が発生したコントローラが書き込み処理を認識していないため、データは失われません。
リモートノードへのNVRAMレプリケーションがブロックされるサイト間接続障害は、より複雑な状況です。書き込みがリモートノードにレプリケートされなくなるため、コントローラで重大なエラーが発生した場合にデータが失われる可能性があります。さらに重要なことは、このような状況で別のノードにフェイルオーバーしようとするとデータが失われることです。
制御要素は、NVRAMが同期されているかどうかです。NVRAMが同期されていれば、ノード間のフェイルオーバーを安全に実行でき、データ損失のリスクはありません。MetroCluster構成では、NVRAMと基盤となるアグリゲートのプレックスが同期されていれば、データ損失のリスクなしにスイッチオーバーを実行できます。
データが同期されていない場合、ONTAPは、フェイルオーバーまたはスイッチオーバーを強制的に実行しないかぎり、フェイルオーバーまたはスイッチオーバーを許可しません。この方法で条件を変更すると、元のコントローラにデータが残っている可能性があり、データ損失が許容されることが確認されます。
データベースやその他のアプリケーションは、ディスク上のデータのより大きな内部キャッシュを保持するため、フェイルオーバーやスイッチオーバーを強制的に実行した場合に特に破損の影響を受けやすくなります。強制的なフェイルオーバーまたはスイッチオーバーが発生した場合、以前に確認済みの変更は事実上破棄されます。ストレージアレイの内容は実質的に時間を逆方向にジャンプし、キャッシュの状態はディスク上のデータの状態を反映しなくなります。
この状況を回避するために、ONTAPでは、NVRAMの障害に対する特別な保護をボリュームに設定できます。この保護メカニズムがトリガーされると、ボリュームがNVFAILという状態になります。この状態になると、原因アプリケーションがクラッシュするI/Oエラーが発生します。このクラッシュにより、古いデータを使用しないようにアプリケーションがシャットダウンされます。コミットされたトランザクションデータがログに含まれている必要があるため、データが失われないようにしてください。次の手順では、管理者がホストを完全にシャットダウンしてから、LUNとボリュームを手動で再度オンラインに戻します。これらの手順にはいくつかの作業が含まれる可能性がありますが、このアプローチはデータの整合性を確保するための最も安全な方法です。すべてのデータがこの保護を必要とするわけではありません。そのため、NVFAILの動作はボリューム単位で設定できます。
HAペアとMetroCluster
MetroClusterには、2ノードとHAペアの2つの構成があります。2ノード構成の動作は、NVRAMに関してはHAペアと同じです。突然の障害が発生した場合、パートナーノードはNVRAMデータを再生してドライブの整合性を確保し、確認済みの書き込みが失われていないことを確認できます。
HAペア構成では、ローカルパートナーノードにもNVRAMがレプリケートされます。MetroClusterを使用しないスタンドアロンHAペアの場合と同様に、単純なコントローラ障害ではパートナーノードでNVRAMが再生されます。サイト全体が突然失われた場合、リモートサイトには、ドライブの整合性を確保してデータの提供を開始するために必要なNVRAMも用意されています。
MetroClusterの重要な側面の1つは、通常の運用状態ではリモートノードがパートナーデータにアクセスできないことです。各サイトは本質的に、反対のサイトのパーソナリティを想定できる独立したシステムとして機能します。このプロセスはスイッチオーバーと呼ばれ、計画的スイッチオーバーでは、サイトの処理が無停止で反対側のサイトに移行されます。また、サイトが失われ、ディザスタリカバリの一環として手動または自動のスイッチオーバーが必要になる計画外の状況も含まれます。
スイッチオーバーとスイッチバック
スイッチオーバーとスイッチバックという用語は、MetroCluster構成のリモートコントローラ間でボリュームを移行するプロセスを指します。このプロセスでは、リモートノードのみが環境されます。4ボリューム構成でMetroClusterを使用する場合のローカルノードのフェイルオーバーは、前述したテイクオーバーとギブバックのプロセスと同じです。
計画的スイッチオーバーとスイッチバック
計画的スイッチオーバーまたはスイッチバックは、ノード間のテイクオーバーやギブバックと似ています。このプロセスには複数の手順があり、数分かかるように見える場合もありますが、実際には、ストレージリソースとネットワークリソースを複数のフェーズで正常に移行します。完全なコマンドの実行に必要な時間よりもはるかに短時間で制御転送が行われる瞬間。
テイクオーバー/ギブバックとスイッチオーバー/スイッチバックの主な違いは、FC SAN接続への影響です。ローカルのテイクオーバー/ギブバックでは、ローカルノードへのFCパスがすべて失われ、ホストのネイティブMPIOを使用して使用可能な代替パスに切り替えます。ポートは再配置されません。スイッチオーバーとスイッチバックでは、コントローラの仮想FCターゲットポートがもう一方のサイトに移行します。一時的にSAN上に存在しなくなり、代わりのコントローラに再表示されます。
SyncMirrorタイムアウト
SyncMirrorは、シェルフ障害から保護するONTAPのミラーリングテクノロジです。シェルフが離れた場所に配置されている場合は、リモートデータ保護が実現します。
SyncMirrorは汎用同期ミラーリングを提供しません。その結果、可用性が向上します。一部のストレージシステムでは、一定のオールオアナッシングミラーリング(Dominoモードと呼ばれることもあります)を使用します。リモートサイトへの接続が失われるとすべての書き込みアクティビティが停止する必要があるため、この形式のミラーリングはアプリケーションで制限されます。そうしないと、書き込みは一方のサイトに存在し、もう一方のサイトには存在しません。通常、このような環境では、サイト間の接続が短時間(30秒など)以上切断された場合にLUNがオフラインになるように構成されます。
この動作は、一部の環境に適しています。ただし、ほとんどのアプリケーションには、通常の動作条件下で保証された同期レプリケーションを提供しながら、レプリケーションを一時停止できる解決策が必要です。サイト間の接続が完全に失われると、多くの場合、災害が近い状況とみなされます。通常、このような環境は、接続が修復されるか、データを保護するために環境をシャットダウンする正式な決定が下されるまで、オンラインのままでデータを提供します。リモートレプリケーションの障害のみが原因でアプリケーションを自動的にシャットダウンする必要があるのは珍しいことです。
SyncMirrorは、タイムアウトの柔軟性を備えた同期ミラーリングの要件に対応しています。リモートコントローラやプレックスへの接続が失われると、30秒のタイマーがカウントダウンを開始します。カウンタが0に達すると、ローカルデータを使用して書き込みI/O処理が再開されます。データのリモートコピーは使用可能ですが、接続が回復するまで時間内に凍結されます。再同期では、アグリゲートレベルのSnapshotを使用してシステムをできるだけ迅速に同期モードに戻します。
特に、多くの場合、この種の汎用的なオールオアナッシングDominoモードレプリケーションは、アプリケーションレイヤでより適切に実装されています。たとえば、Oracle DataGuardには最大保護モードが用意されており、どのような状況でも長時間のインスタンスレプリケーションが保証されます。設定可能なタイムアウトを超えてレプリケーションリンクに障害が発生すると、データベースはシャットダウンします。
ファブリック接続MetroClusterによる自動無人スイッチオーバー
Automatic Unattended Switchover(AUSO;自動無人スイッチオーバー)は、クロスサイトHAの形式を提供するファブリック接続MetroClusterの機能です。前述したように、MetroClusterには2つのタイプ(各サイトに1台のコントローラを配置する場合と、各サイトに1台のHAペアを配置する場合)があります。HAオプションの主な利点は、コントローラの計画的シャットダウンと計画外シャットダウンのどちらでもすべてのI/Oをローカルで処理できることです。シングルノードオプションのメリットは、コスト、複雑さ、インフラの削減です。
AUSOの主な価値は、ファブリック接続MetroClusterシステムのHA機能を向上させることです。各サイトが反対側のサイトの健常性を監視し、データを提供するノードがなくなると、AUSOによって迅速なスイッチオーバーが実行されます。このアプローチは、可用性の点でHAペアに近い構成になるため、サイトごとにノードが1つだけのMetroCluster構成で特に役立ちます。
AUSOでは、HAペアレベルで包括的な監視を行うことはできません。HAペアには、ノード間の直接通信用の2本の冗長な物理ケーブルが含まれているため、きわめて高い可用性を実現できます。さらに、HAペアの両方のノードが冗長ループ上の同じディスクセットにアクセスできるため、1つのノードが別のノードの健常性を監視するための別のルートが提供されます。
MetroClusterクラスタは複数のサイトにまたがって存在し、ノード間の通信とディスクアクセスの両方がサイト間ネットワーク接続に依存します。クラスタの残りの部分のハートビートを監視する機能には制限があります。AUSOは、ネットワークの問題が原因で、もう一方のサイトが使用できない状況ではなく、実際にダウンしている状況を区別する必要があります。
その結果、HAペアのコントローラで、システムパニックなどの特定の理由で発生したコントローラ障害が検出された場合、テイクオーバーが要求されることがあります。また、接続が完全に失われた場合(ハートビートの損失とも呼ばれます)、テイクオーバーを促すこともあります。
MetroClusterシステムで自動スイッチオーバーを安全に実行できるのは、元のサイトで特定の障害が検出された場合のみです。また、ストレージシステムの所有権を取得するコントローラは、ディスクとNVRAMのデータが同期されていることを保証できる必要があります。コントローラは、ソースサイトとの通信が失われて稼働している可能性があるため、スイッチオーバーの安全性を保証できません。スイッチオーバーを自動化するためのその他のオプションについては、次のセクションのMetroCluster Tiebreaker(MCTB)解決策に関する情報を参照してください。
ファブリック接続MetroClusterを使用したMetroCluster Tiebreaker
この"NetApp MetroCluster Tiebreaker"ソフトウェアを第3のサイトで実行すると、MetroCluster環境の健全性を監視し、通知を送信できます。また、災害時にオプションでスイッチオーバーを強制的に実行することもできます。Tiebreakerの詳細についてはを参照して"NetApp Support Site"ください。MetroCluster Tiebreakerの主な目的はサイトの損失を検出することです。また、サイトの損失と接続の損失を区別する必要があります。たとえば、Tiebreakerがプライマリサイトに到達できなかったためにスイッチオーバーが発生しないようにします。そのため、Tiebreakerはリモートサイトがプライマリサイトに接続する能力も監視します。
AUSOによる自動スイッチオーバーもMCTBと互換性があります。AUSOは、特定の障害イベントを検出し、NVRAMとSyncMirrorのプレックスが同期されている場合にのみスイッチオーバーを実行するように設計されているため、非常に迅速に対応します。
一方、Tiebreakerはリモートに配置されているため、サイトの停止を宣言する前にタイマーが経過するのを待つ必要があります。Tiebreakerは最終的にAUSOの対象となるコントローラ障害を検出しますが、一般的にはAUSOがスイッチオーバーを開始しており、Tiebreakerが機能する前にスイッチオーバーを完了している可能性があります。Tiebreakerから送信される2つ目のswitchoverコマンドは拒否されます。

|
MCTBソフトウェアは、強制的なスイッチオーバー時に、NVRAM WASまたはプレックス(あるいはその両方)が同期されていることを検証しません。メンテナンス作業中に自動スイッチオーバーが設定されている場合は無効にして、NVRAMまたはSyncMirrorプレックスの同期が失われるようにしてください。 |
また、MCTBは、次の一連のイベントにつながるローリングディザスタに対応できない場合があります。
-
サイト間の接続が30秒以上中断されます。
-
SyncMirrorレプリケーションがタイムアウトし、プライマリサイトで処理が続行されるため、リモートレプリカは古くなります。
-
プライマリサイトが失われます。その結果、プライマリサイトにレプリケートされていない変更が存在します。その場合、次のようないくつかの理由でスイッチオーバーが望ましくない可能性があります。
-
重要なデータはプライマリサイトに存在し、最終的にリカバリ可能になる可能性があります。スイッチオーバーによってアプリケーションの動作が継続されると、重要なデータは実質的に破棄されます。
-
サバイバーサイトのアプリケーションで、サイト障害時にプライマリサイトのストレージリソースを使用していた場合、データがキャッシュされている可能性があります。スイッチオーバーでは、キャッシュと一致しない古いバージョンのデータが生成されます。
-
サバイバーサイトのオペレーティングシステムで、サイト障害時にプライマリサイトのストレージリソースを使用していた場合、キャッシュデータがある可能性があります。スイッチオーバーでは、キャッシュと一致しない古いバージョンのデータが生成されます。最も安全な方法は、Tiebreakerがサイト障害を検出した場合にアラートを送信するように設定し、スイッチオーバーを強制的に実行するかどうかを決定することです。キャッシュされたデータを消去するには、アプリケーションやオペレーティングシステムのシャットダウンが必要になる場合があります。さらに、NVFAIL設定を使用して保護を強化し、フェイルオーバープロセスを合理化することもできます。
-
MetroCluster IPを使用したONTAPメディエーター
ONTAPメディエーターは、MetroCluster IPおよびその他の特定のONTAPソリューションで使用されます。これは、前述のMetroCluster Tiebreakerソフトウェアと同様に従来のTiebreakerサービスとして機能しますが、重要な機能を実行する自動無人スイッチオーバーも含まれています。
ファブリック接続MetroClusterは、反対側のサイトのストレージデバイスに直接アクセスできます。これにより、一方のMetroClusterコントローラがドライブからハートビートデータを読み取ることで、他のコントローラの健常性を監視できます。これにより、一方のコントローラがもう一方のコントローラの障害を認識し、スイッチオーバーを実行できるようになります。
一方、MetroCluster IPアーキテクチャでは、すべてのI/Oがコントローラとコントローラの接続を介して排他的にルーティングされるため、リモートサイトのストレージデバイスに直接アクセスすることはありません。これにより、コントローラで障害を検出してスイッチオーバーを実行する機能が制限されます。そのため、サイトの損失を検出して自動的にスイッチオーバーを実行するためには、ONTAPメディエーターがTiebreakerデバイスとして必要になります。
ClusterLionを使用した3番目の仮想サイト
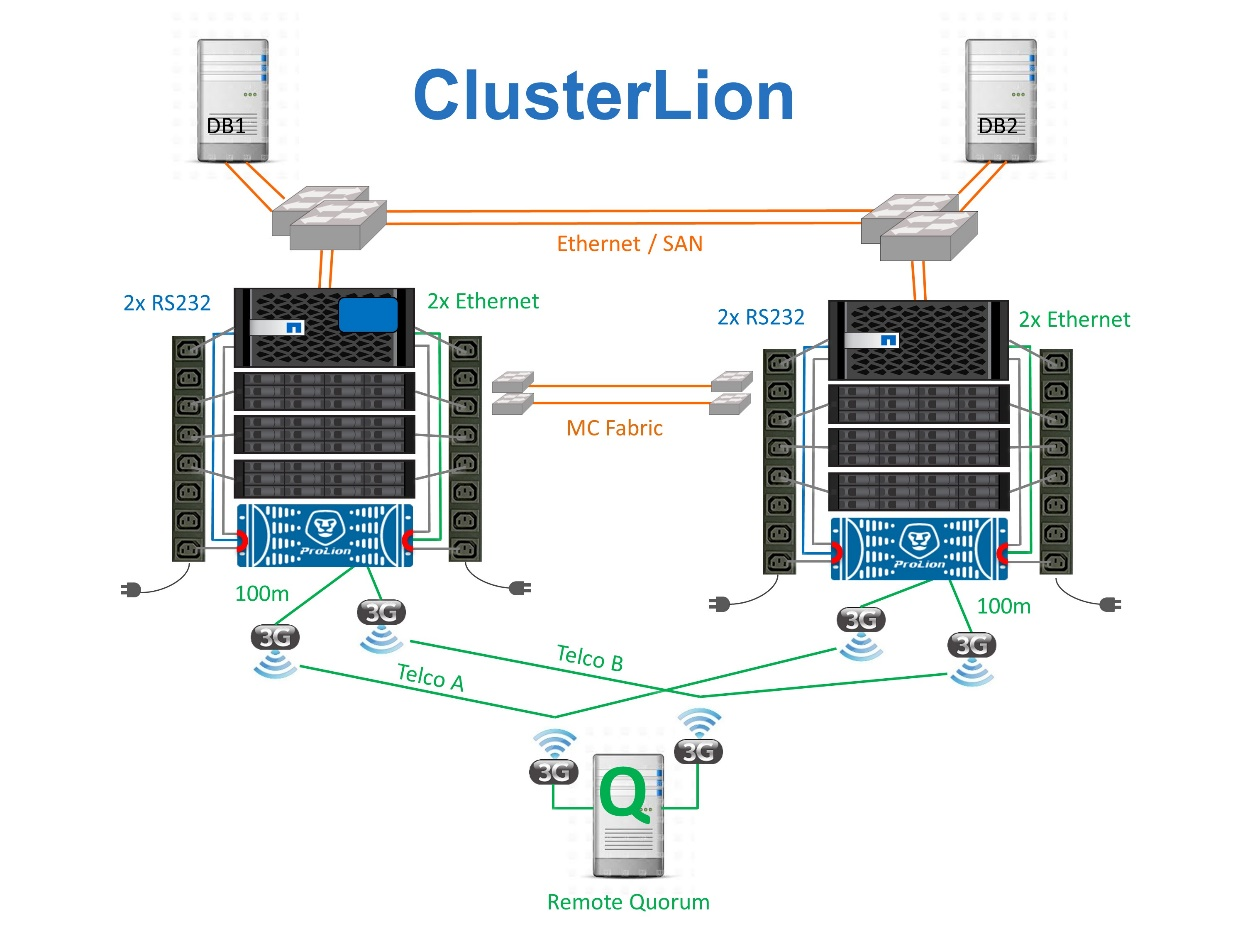
ClusterLionは、仮想の第3サイトとして機能する高度なMetroCluster監視アプライアンスです。このアプローチにより、完全に自動化されたスイッチオーバー機能により、MetroClusterを2サイト構成で安全に導入できます。さらに、ClusterLionでは、追加のネットワークレベル監視を実行し、スイッチオーバー後の処理を実行できます。完全なドキュメントはProLionから入手できます。
-
ClusterLionアプライアンスは、直接接続されたイーサネットケーブルとシリアルケーブルでコントローラの健常性を監視します。
-
2つのアプライアンスは、冗長3Gワイヤレス接続で相互に接続されています。
-
ONTAPコントローラへの電源は、内部リレーを介して配線されます。サイト障害が発生すると、内部UPSシステムを搭載したClusterLionによって電源接続が切断されてからスイッチオーバーが実行されます。このプロセスにより、スプリットブレイン状態が発生しないようにします。
-
ClusterLionは、30秒のSyncMirrorタイムアウト内にスイッチオーバーを実行するか、まったく実行しません。
-
ClusterLionでは、NVRAMプレックスとSyncMirrorプレックスの状態が同期されていないかぎり、スイッチオーバーは実行されません。
-
ClusterLionでは、MetroClusterが完全に同期されている場合にのみスイッチオーバーが実行されるため、NVFAILは必要ありません。この構成では、計画外スイッチオーバーが発生しても、拡張Oracle RACなどのサイトスパニング環境をオンラインのまま維持できます。
-
ファブリック接続MetroClusterとMetroCluster IPの両方をサポート