

 はじめに
はじめに
ソフトウェア構成
 変更を提案
変更を提案
ネットアップのBeeGFSのソフトウェア設定には、BeeGFSネットワークコンポーネント、EF600ブロックノード、BeeGFSファイルノード、リソースグループ、BeeGFSサービスが含まれます。
BeeGFSネットワーク設定
BeeGFSネットワーク設定は、次のコンポーネントで構成されます。
-
*フローティングIP *フローティングIPは、同じネットワーク内の任意のサーバーに動的にルーティングできる一種の仮想IPアドレスです。複数のサーバーが同じフローティングIPアドレスを所有できますが、一度にアクティブにできるのは1つのサーバーのみです。
各BeeGFSサーバサービスには、BeeGFSサーバサービスの実行場所に応じてファイルノード間を移動できる独自のIPアドレスがあります。このフローティングIP構成では、各サービスが他のファイルノードに独立してフェイルオーバーできます。クライアントは、特定のBeeGFSサービスのIPアドレスを知るだけで済み、そのサービスを現在実行しているファイルノードを認識する必要はありません。
-
* BeeGFSサーバのマルチホーミング構成*解決策 の密度を高めるために'各ファイル・ノードには同じIPサブネットにIPが設定された複数のストレージ・インターフェイスがあります
この設定がLinuxネットワークスタックで正常に機能するようにするには、追加の設定が必要です。これは、デフォルトでは、IPが同じサブネット内にある場合、1つのインターフェイスへの要求に別のインターフェイスで応答できるからです。他の欠点に加えて、このデフォルトの動作により、RDMA接続を適切に確立または維持することができなくなります。
Ansibleベースの導入では、逆方向パス(RP)とアドレス解決プロトコル(ARP)の動作の締め付けに加え、フローティングIPの開始と停止のタイミングを保証します。対応するIPルートとルールが動的に作成され、マルチホームネットワークの設定が適切に機能できるようになります。
-
* BeeGFSクライアントのマルチレール構成*Multi-rail:複数の独立したネットワークレールを使用してパフォーマンスを向上させるアプリケーションの機能を指します
BeeGFSはRDMAを接続に使用できますが、BeeGFSはIPoIBを使用してRDMA接続の検出と確立を簡素化します。BeeGFSクライアントが複数のInfiniBandインターフェイスを使用できるようにするには、異なるサブネット内にあるIPアドレスを各クライアントに設定し、各サブネット内のBeeGFSサーバサービスの半分に優先インターフェイスを設定します。
次の図では、ライトグリーンで強調表示されているインターフェイスは1つのIPサブネット(たとえば、「100.127.0.0.0/16」)に配置され、ダークグリーンのインターフェイスは別のサブネット(たとえば「100.128.0.0/16」)に配置されています。
次の図に、複数のBeeGFSクライアントインターフェイス間でのトラフィックの分散を示します。
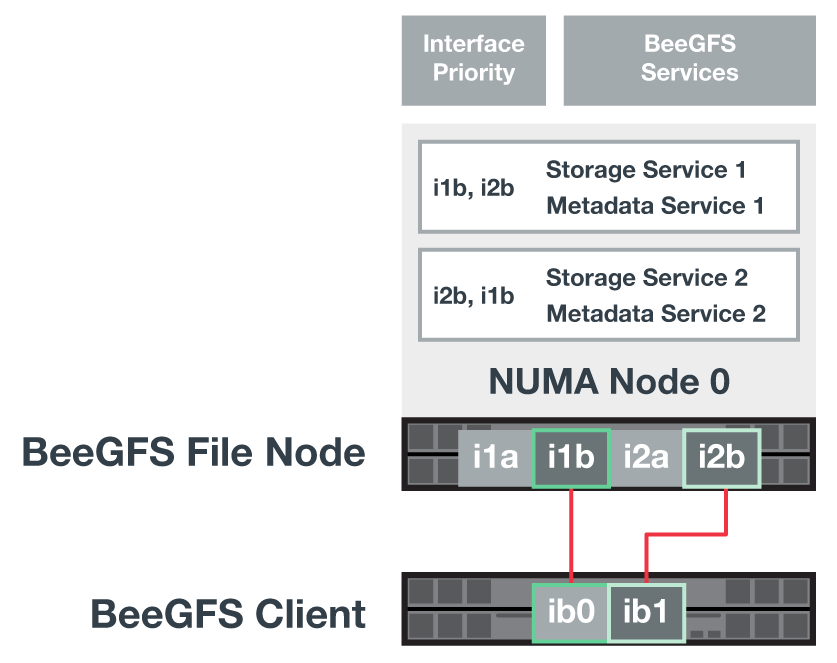
BeeGFSの各ファイルは通常、複数のストレージサービスにまたがってストライピングされるため、マルチレール構成では、単一のInfiniBandポートでは実現できないスループットよりも高いスループットをクライアントに提供できます。たとえば、次のコード例は、クライアントが両方のインターフェイス間でトラフィックを分散できるようにする、一般的なファイルストライピング設定を示しています。
root@ictad21h01:/mnt/beegfs# beegfs-ctl --getentryinfo myfile Entry type: file EntryID: 11D-624759A9-65 Metadata node: meta_01_tgt_0101 [ID: 101] Stripe pattern details: + Type: RAID0 + Chunksize: 1M + Number of storage targets: desired: 4; actual: 4 + Storage targets: + 101 @ stor_01_tgt_0101 [ID: 101] + 102 @ stor_01_tgt_0101 [ID: 101] + 201 @ stor_02_tgt_0201 [ID: 201] + 202 @ stor_02_tgt_0201 [ID: 201]
2つのIPoIBサブネットを使用することは、論理的に区別されます。必要に応じて、単一の物理InfiniBandサブネット(ストレージネットワーク)を使用できます。

BeeGFS 7.3.0では、1つのIPoIBサブネットで複数のIBインターフェイスを使用できるように、マルチレールサポートが追加されました。NetApp解決策 のBeeGFSの設計は、BeeGFS 7.3.0が一般的に使用可能になる前に開発されたものであるため、2つのIPサブネットを使用してBeeGFSクライアントの2つのIBインターフェイスを使用する方法を示しています。マルチIPサブネットアプローチの利点の1つは、BeeGFSクライアントノードでマルチホーミングを設定する必要がないことです(詳細については、を参照してください) "BeeGFS RDMAのサポート")。
EF600ブロックノード構成
ブロックノードは、同じドライブセットへの共有アクセスを持つ2つのアクティブ/アクティブRAIDコントローラで構成されます。通常、各コントローラにはシステムに設定されているボリュームの半分が所有されますが、必要に応じてもう一方のコントローラがテイクオーバーできます。
ファイルノード上のマルチパスソフトウェアは、各ボリュームへのアクティブなパスと最適パスを決定し、ケーブル、アダプタ、またはコントローラに障害が発生した場合に自動的に代替パスに移動します。
次の図は、EF600ブロックノードのコントローラのレイアウトを示しています。

共有ディスクのHA解決策 を使用する場合、ボリュームが両方のファイルノードにマッピングされ、必要に応じて相互にテイクオーバーできるようになります。次の図は、パフォーマンスを最大化するためにBeeGFSサービスと優先ボリューム所有権を設定する例を示しています。各BeeGFSサービスの左側にあるインターフェイスは、クライアントとその他のサービスが接続に使用する優先インターフェイスを示します。
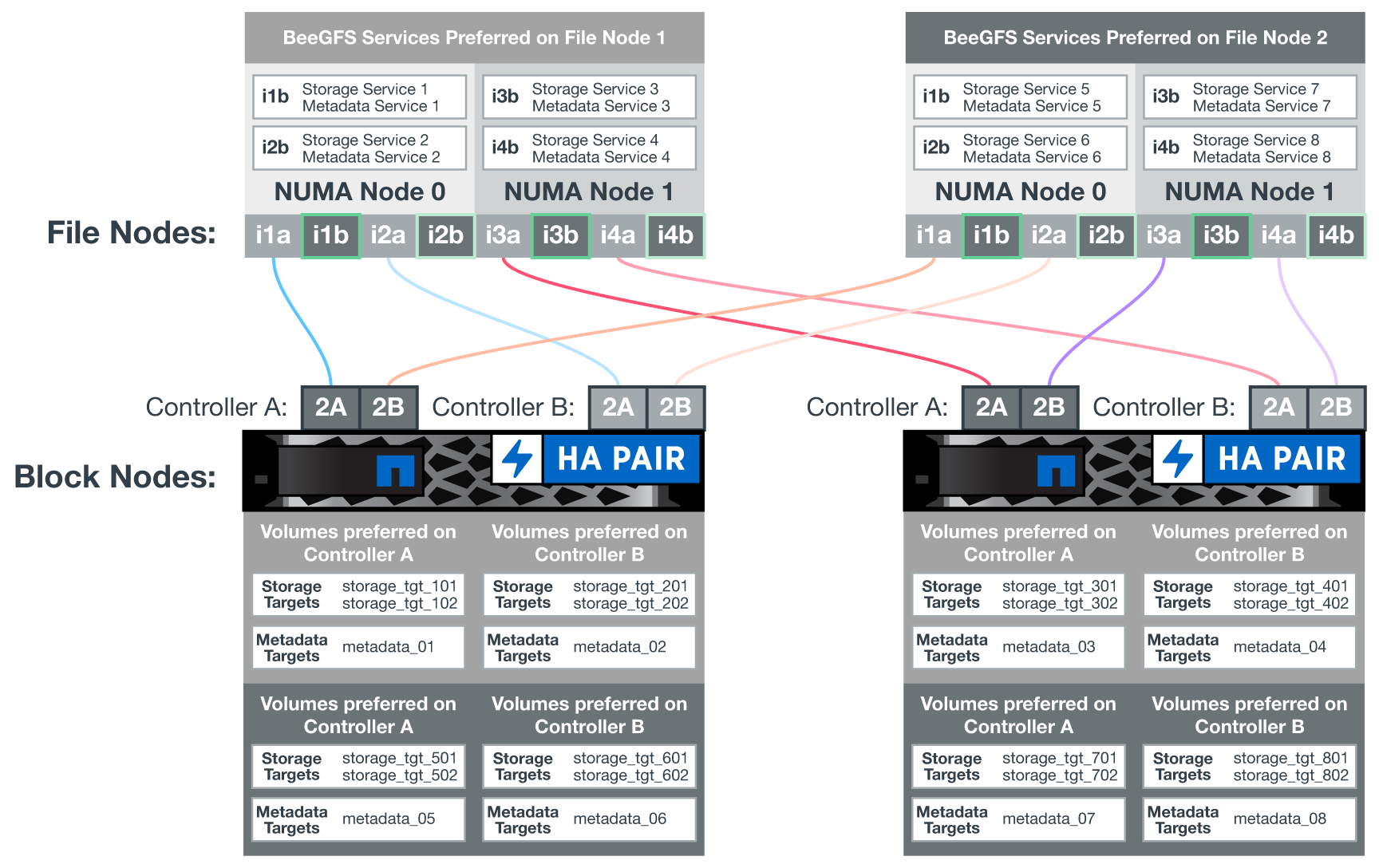
前の例では、クライアントとサーバサービスは、インターフェイスi1bを使用してストレージサービス1と通信することを好みます。ストレージサービス1は、最初のブロックノードのコントローラA上のボリューム(storage_tgt_101、102)と通信するための優先パスとしてインターフェイスi1aを使用します。この構成では、InfiniBandアダプタで使用できる完全な双方向PCIe帯域幅を使用し、PCIe 4.0では実現できないデュアルポートHDR InfiniBandアダプタよりも優れたパフォーマンスを実現します。
BeeGFSファイルのノード設定
BeeGFSファイルノードは、複数のファイルノード間でBeeGFSサービスのフェイルオーバーを容易にするために、ハイアベイラビリティ(HA)クラスタに構成されます。
HAクラスタは、広く使用されている2つのLinux HAプロジェクトに基づいて設計されています。クラスタメンバーシップ用のCorosyncと、クラスタリソース管理用のPacemakerです。詳細については、を参照してください "高可用性アドオンに関するRed Hatトレーニング"。
複数のオープンクラスタフレームワーク(OCF)リソースエージェントがネットアップにオーサリングされ、拡張されました。このエージェントを使用すると、クラスタでBeeGFSリソースのインテリジェントな起動と監視が可能になります。
BeeGFS HA clusters(BeeGFS HAクラスタ
通常、BeeGFSサービスを(HAの有無にかかわらず)開始するときは、次のようなリソースが必要になります。
-
サービスに到達できるIPアドレス。通常はNetwork Managerによって設定されます。
-
BeeGFSがデータを格納するためのターゲットとして使用する基盤となるファイルシステム。
これらは通常'/etc/fstabで定義され'システム・ディスクでマウントされます
-
他のリソースの準備ができたときにBeeGFSプロセスを開始するシステムdサービス。
追加のソフトウェアがない場合、これらのリソースは単一のファイルノードからのみ開始されます。したがって、ファイルノードがオフラインになると、BeeGFSファイルシステムの一部にアクセスできなくなります。
複数のノードでBeeGFSサービスを起動できるため、ペースメーカーは各サービスと依存するリソースが一度に1つのノードでのみ動作していることを確認する必要があります。たとえば、2つのノードが同じBeeGFSサービスを起動しようとすると、どちらも基盤となるターゲット上の同じファイルに書き込みを試みると、データが破損するおそれがあります。この状況を回避するために、Pacemakerは、クラスタ全体の状態をすべてのノードで確実に同期し、クォーラムを確立するために、Corosyncに依存しています。
クラスタで障害が発生すると、Pacemakerは別のノードのBeeGFSリソースに反応して再起動します。一部の状況では、ペースメーカーが障害のある元のノードと通信できず、リソースが停止していることを確認できない場合があります。BeeGFSリソースを他の場所から再起動する前にノードが停止していることを確認するために、Pacemakerは障害のあるノードをフェンシングします。この場合、電源を切断します。
多くのオープンソースフェンシングエージェントを使用すると、Pacemakerは配電ユニット(PDU)を搭載したノードを遮断したり、RedfishなどのAPIを搭載したサーバベースボード管理コントローラ(BMC)を使用してノードを遮断したりできます。
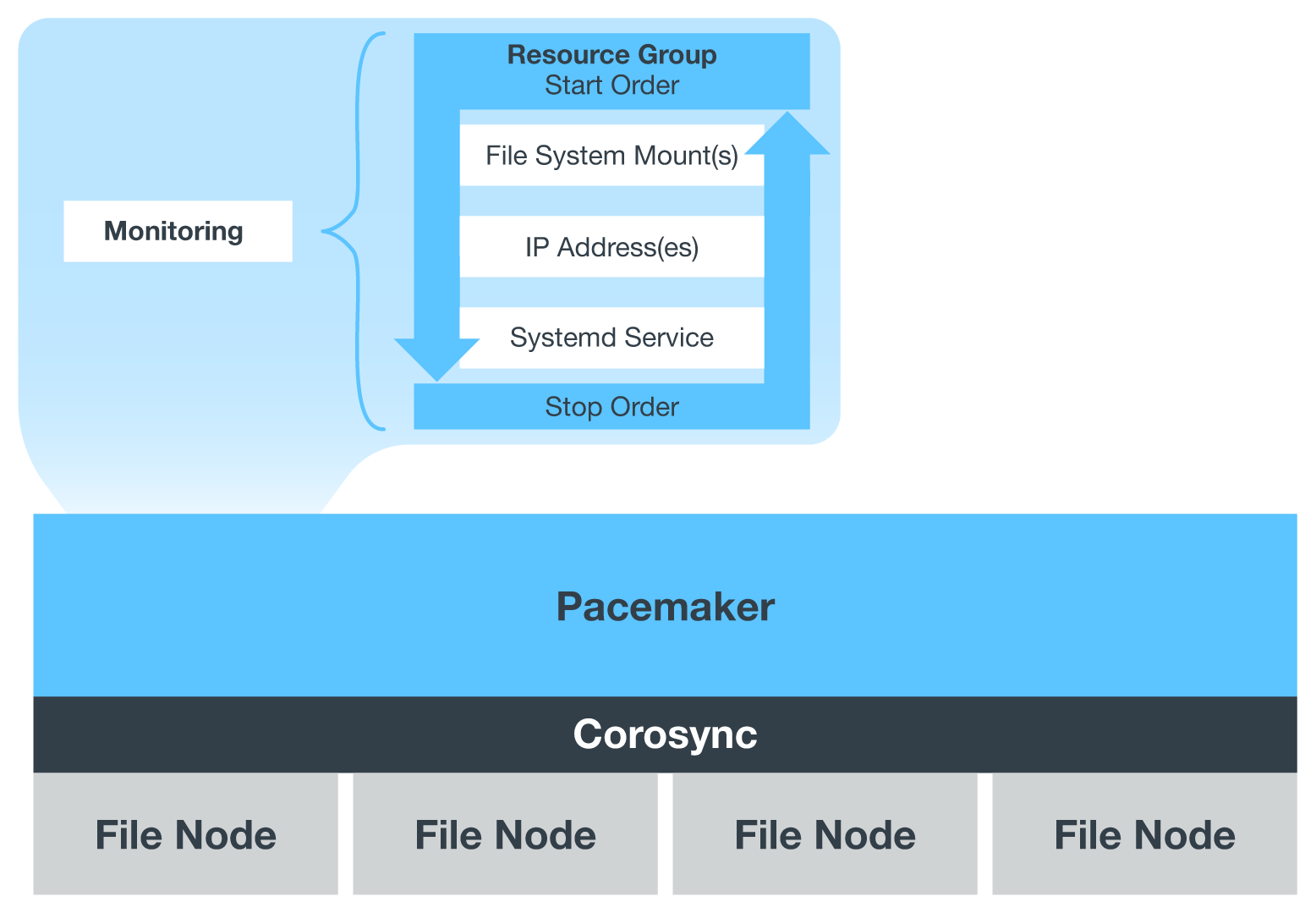
HAクラスタでBeeGFSを実行している場合は、すべてのBeeGFSサービスと基盤となるリソースがペースメーカーによってリソースグループで管理されます。各BeeGFSサービスとそれが依存するリソースは、リソースグループに設定されます。これにより、リソースが正しい順序で開始および停止され、同じノードに配置されるようになります。
BeeGFSリソースグループごとに、PacemakerはカスタムのBeeGFSモニタリングリソースを実行します。このリソースは、障害状態を検出し、特定のノードでBeeGFSサービスがアクセスできなくなったときにフェイルオーバーをインテリジェントにトリガーします。
次の図に、Pacemaker制御のBeeGFSサービスと依存関係を示します。
|
|
同じタイプの複数のBeeGFSサービスが同じノードで起動するように、Pacemakerはマルチモード設定方式を使用してBeeGFSサービスを開始するように設定されます。詳細については、を参照してください "マルチモードでのBeeGFSのマニュアル"。 |
BeeGFSサービスは複数のノードで起動できる必要があるため'各サービスの構成ファイル(通常は/etc/beegfsにあります)は'そのサービスのBeeGFSターゲットとして使用されるEシリーズボリュームの1つに保存されますこれにより、特定のBeeGFSサービスのデータとともに、サービスの実行に必要なすべてのノードから設定へのアクセスが可能になります。
# tree stor_01_tgt_0101/ -L 2
stor_01_tgt_0101/
├── data
│ ├── benchmark
│ ├── buddymir
│ ├── chunks
│ ├── format.conf
│ ├── lock.pid
│ ├── nodeID
│ ├── nodeNumID
│ ├── originalNodeID
│ ├── targetID
│ └── targetNumID
└── storage_config
├── beegfs-storage.conf
├── connInterfacesFile.conf
└── connNetFilterFile.conf